Make Your Own Environment#
GymPR offers the possibility to develop research-specific environments with a planar motor system. To this end, GymPR has a specific code design:
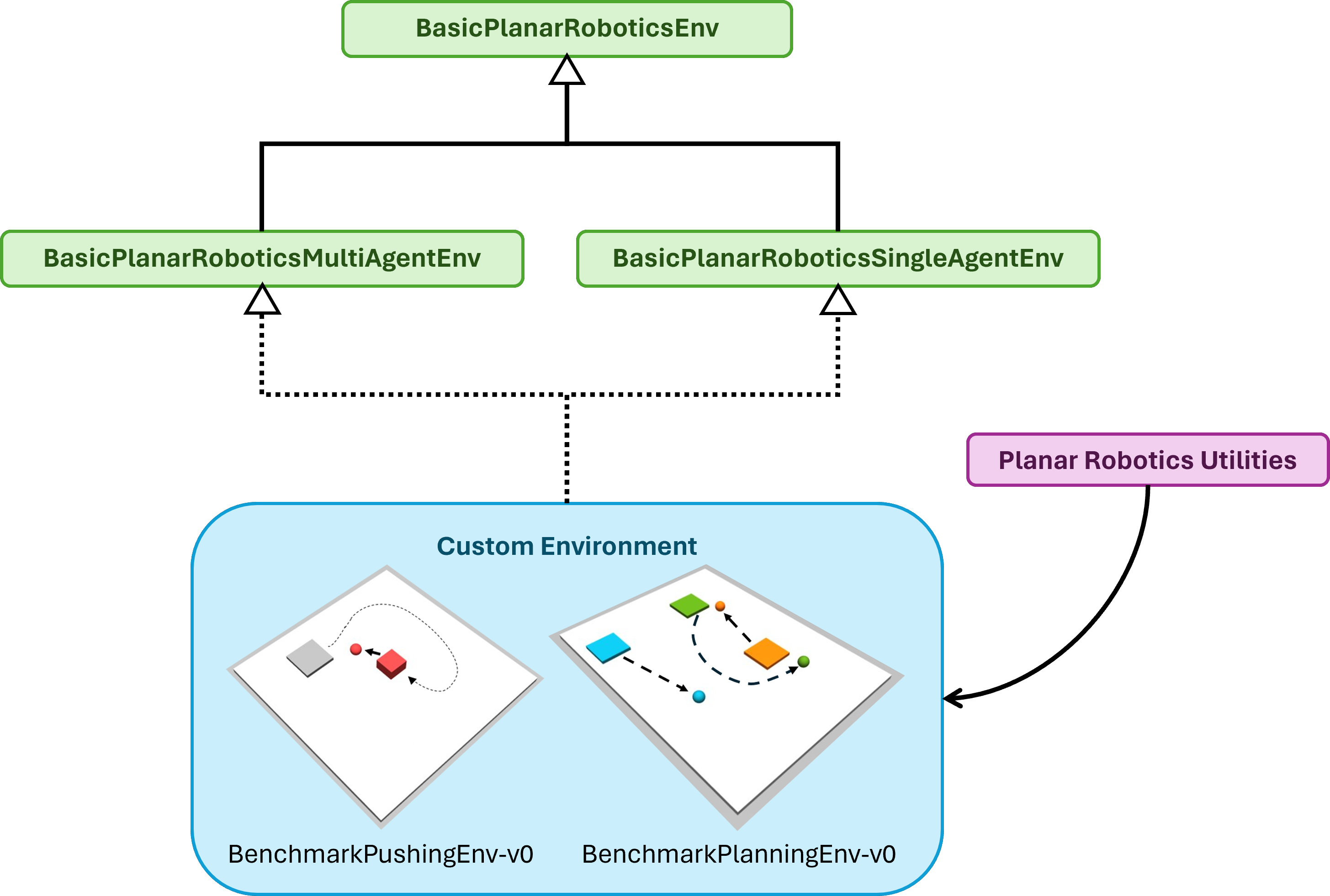
The BasicPlanarRoboticsEnv provides functionality that is required in every RL environment with a planar motor system, such as collision checking
and rendering functionality as well as the possibility to generate a MuJoCo XML string from the current mover-tile-configuration. Note that the MuJoCo
model can be customized by the user by defining additional XML strings that are automatically added by the BasicPlanarRoboticsEnv. For example, this
allows to add custom actuators for the movers, sensors, or robots to the MuJoCo model, so that the user can build a simulation of a specific (industrial) application.
The BasicPlanarRoboticsEnv is designed independently from any RL API, since the main focus is on providing functionality that is related to the physics engine and the
planar motor system.
To provide the user with a basic structure for single-agent and multi-agent RL, GymPR contains the BasicPlanarRoboticsSingleAgentEnv and
BasicPlanarRoboticsMultiAgentEnv that both include the functionality of the BasicPlanarRoboticsEnv. A custom environment can be inherited from either
the single-agent or the multi-agent environment. The multi-agent environment follows the PettingZoo parallel API, since all movers, i.e. agents,
must be updated simultaneously in every control cycle. The single-agent environment follows the Gymnasium API and provides basic functionality for
standard RL and goal-conditioned RL, such as a compute_reward method that takes the arguments achieved_goal and desired_goal. This is a typical
requirement of Hindsight Experience Replay (HER) implementations of common RL libraries, such as Stable-Baselines3
or Tianshou.
Please use the BenchmarkPlanningEnv and BenchmarkPushingEnv as examples for the use of the basic environments.
A detailed documentation of all basic environments and utilities can be found in the following subsections:
Basic Environments
Planar Robotics Utilities